반응형
디폴트 0 (전달 데이터 없음)
중간 1 (두 바퀴 동기화)
전 2
후 3
좌 4
우 5
정지 6
Stop_Count 7
Stop_Count 카운트를 줄이는것까지 코딩
Stop_Count 7
Stop_Count 카운트를 줄이는것까지 코딩
CASE inPut OF
1:
IF -R_RPM > L_RPM THEN
L_RPM := -R_RPM;
ELSE
R_RPM := -L_RPM;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
2:
L_RPM := L_RPM + 1; R_RPM := R_RPM - 1;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
3:
IF L_RPM >= 0 THEN
L_RPM := L_RPM - 1; R_RPM := R_RPM + 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
4:
IF L_RPM > 0 THEN
L_RPM := L_RPM - 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
5:
IF R_RPM < 0 THEN
R_RPM := R_RPM + 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
6:
R_RPM := 0; L_RPM := 0;
7: Stop_Count := 100;
END_CASE;
END_CASE;
Stop_Count 카운트를 줄이는것까지 코딩 후
0이 되면 좌우 바퀴 0으로 설정
CASE inPut OF
1:
IF -R_RPM > L_RPM THEN
L_RPM := -R_RPM;
ELSE
R_RPM := -L_RPM;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
2:
L_RPM := L_RPM + 1; R_RPM := R_RPM - 1;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
3:
IF L_RPM > 0 THEN
L_RPM := L_RPM - 1; R_RPM := R_RPM + 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
4:
IF L_RPM > 0 THEN
L_RPM := L_RPM - 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
5:
IF R_RPM < 0 THEN
R_RPM := R_RPM + 1;
END_IF;
IF Stop_Count > 0 THEN
Stop_Count := Stop_Count - 1;
ELSE
R_RPM := 0;
L_RPM := 0;
END_IF;
6:
R_RPM := 0; L_RPM := 0;
7: Stop_Count := 100;
Stop_Count 카운트를 줄이는것까지 코딩 후
0이 되면 좌우 바퀴 0으로 설정
반응형
'보물창고 > IT 정보' 카테고리의 다른 글
| CSS 시작하기 (사용 방법, 강좌) (0) | 2011.08.01 |
|---|---|
| Campus Wizard 9기, IBMer가 되고 싶은 사람 모두 모여라! (0) | 2011.07.28 |
| campus wizard 9기, IBMer가 되고 싶은 사람 모두 모여라! [IBM on Campus] (0) | 2011.07.27 |
| campus wizard 9기, IBMer가 되고 싶은 사람 모두 모여라! [IBM on Campus] (0) | 2011.07.27 |
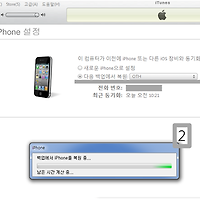
| 아이폰 4 리퍼폰 아이튠즈 복원 방법 (iPhone 백업 신도림 한빛 마이크로 시스템, 홈버튼 불량) (4) | 2011.07.12 |
| HTML 5로 모바일 웹 애플리케이션 작성하기, Part 4: Web Workers를 사용하여 모바일 웹 애플리케이션 속도 높이기 (0) | 2011.06.28 |
| HTML 5로 모바일 웹 애플리케이션 작성하기, Part 3: HTML 5를 사용하여 모바일 웹 애플리케이션을 오프라인에서 작동하게 하기 (0) | 2011.06.28 |
| HTML 5로 모바일 웹 애플리케이션 작성하기, Part 2: HTML 5로 모바일 웹 애플리케이션에 대한 로컬 스토리지 잠금 해제하기 (0) | 2011.06.28 |